This project is a quick how-to for building a dGPS navigating robot. The robot is based onnxtprograms.com 5-Minute Bot. The instructions below show how the dGPS sensor can be mounted. In ten minutes you can have a robot that navigates with a GPS sensor. See the video here. 
[box] STEP 1: Build the 5-Minute Bot. Step by step instructions on how to build it are found here.
[/box]
{kind=link}
[box] STEP 2: Prepare the GPS cradle. The cradle uses (1) 11-hole beam.  [/box]
[/box]
[box] STEP 3: Attach the dGPS to the cradle by sliding it onto the blue pegs.

 [/box]
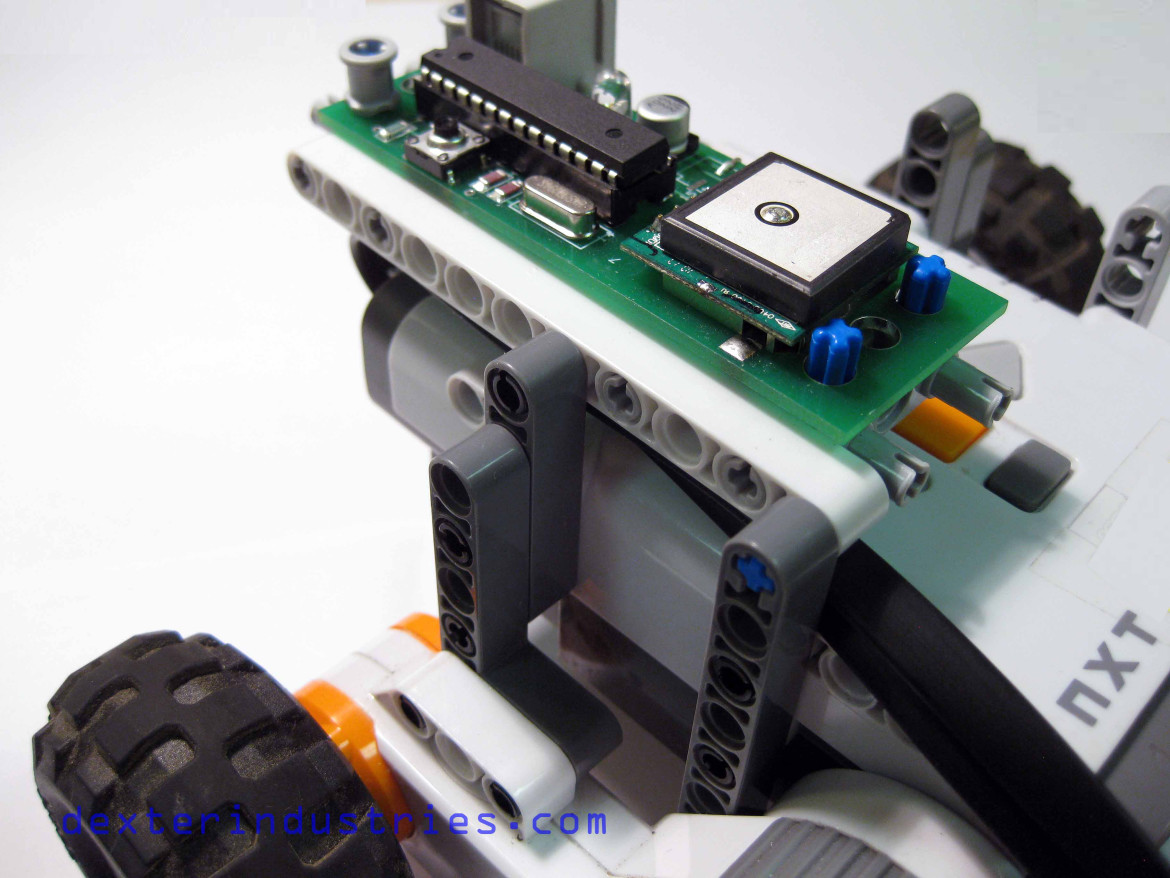
[box] STEP 4: Attach the dGPS to the Robot. Note that the GPS antenna (on the right hand side of the sensor here) is free and clear of obstructions, allowing it to more easily catch a satellite signal.
[/box]
[box] STEP 4: Attach the dGPS to the Robot. Note that the GPS antenna (on the right hand side of the sensor here) is free and clear of obstructions, allowing it to more easily catch a satellite signal.

 [/box]
[/box]
[box] STEP 5: Connect the GPS to Port 1. You can attach the dGPS into any sensor port.
 [/box]
[/box]
[box] OPTIONAL STEP 6: Prepare the Compass boom. The compass is best mounted as far away from the motors, GPS sensor, and NXT as possible, so we put it on a boom.





[box] OPTIONAL STEP 7: Attach the compass boom to the robot.
 [/box]
[/box]